Training Artificial Neural Networks
[1]:
from pyaudi import gdual_double as gdual
from pyaudi import sin, cos, tanh
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
We define the architecture of the network:
Inputs: 3
Hidden layers: 2 with 5 units/layer
Outputs: 1
We will need the first order derivatives
[2]:
n_units = [3, 5, 5, 1]
order = 1
Definition of parameters
We create symbolic variables for the weights with values drawn from \(\mathcal N(0,1)\)
[3]:
def initialize_weights(n_units, order):
weights = []
for layer in range(1, len(n_units)):
weights.append([])
for unit in range(n_units[layer]):
weights[-1].append([])
for prev_unit in range(n_units[layer-1]):
symname = 'w_{{({0},{1},{2})}}'.format(layer, unit, prev_unit)
w = gdual(np.random.randn(), symname , order)
weights[-1][-1].append(w)
return weights
weights = initialize_weights(n_units, order)
And for the biases, initialized to 1
[4]:
def initialize_biases(n_units, order):
biases = []
for layer in range(1, len(n_units)):
biases.append([])
for unit in range(n_units[layer]):
symname = 'b_{{({0},{1})}}'.format(layer, unit)
b = gdual(1, symname , order)
biases[-1].append(b)
return biases
biases = initialize_biases(n_units, order)
Neural network as a gdual expression
We create a function which output is the expression (gdual) corresponding to the neural network
[5]:
def N_f(inputs, w, b):
prev_layer_outputs = inputs
#Hidden layers
for layer in range(len(weights)):
this_layer_outputs = []
for unit in range(len(weights[layer])):
unit_output = 0
unit_output += b[layer][unit]
for prev_unit,prev_output in enumerate(prev_layer_outputs):
unit_output += w[layer][unit][prev_unit] * prev_output
if layer != len(weights)-1:
unit_output = tanh(unit_output)
this_layer_outputs.append(unit_output)
prev_layer_outputs = this_layer_outputs
return prev_layer_outputs
The new function can be used to compute the output of the network given any input:
[6]:
x1 = 1
x2 = 2
x3 = 4
N = N_f([x1,x2, x3], weights, biases)[0]
print('N(x) = {0}'.format(N.constant_cf))
#N
N(x) = 2.565934265083211
Loss function
In our case the desired output of the network will be: \(y(\mathcal x)= x_1x_2 + 0.5x_3 +2\)
[7]:
def y_f(x):
return x[0]*x[1] + 0.5*x[2] + 2
y = y_f([x1,x2,x3])
print('y = {0}'.format(y))
y = 6.0
The training process will seek to minimize a loss function corresponding to the quadratic error.
[8]:
def loss_f(N,y):
return (N-y)**2
loss = loss_f(N, y)
print('loss = {0}'.format(loss.constant_cf))
#loss
loss = 11.792807471729587
The function loss_f accepts a gdual (N) and a float (y) and the output still a gdual, which will make it possible to compute its derivatives wrt any of the parameters of the network:
[9]:
for symbol in loss.symbol_set[-10:]:
print(symbol)
w_{(2,4,0)}
w_{(2,4,1)}
w_{(2,4,2)}
w_{(2,4,3)}
w_{(2,4,4)}
w_{(3,0,0)}
w_{(3,0,1)}
w_{(3,0,2)}
w_{(3,0,3)}
w_{(3,0,4)}
Training (Gradient descent)
We update the weights with gradient descent using the first order derivatives of the loss function with respect to the weights (and biases)
[10]:
def GD_update(loss, w, b, lr):
#Update weights
for layer in range(len(w)):
for unit in range(len(w[layer])):
for prev_unit in range(len(w[layer][unit])):
weight = w[layer][unit][prev_unit]
if weight.symbol_set[0] in loss.symbol_set:
symbol_idx = loss.symbol_set.index(weight.symbol_set[0])
d_idx = [0]*loss.symbol_set_size
d_idx[symbol_idx] = 1
# eg. if d_idx = [1,0,0,0,...] get get the derivatives of loss wrt
# the first symbol (variable) in loss.symbol_set
w[layer][unit][prev_unit] -= loss.get_derivative(d_idx) * lr
#Update biases
for i in range(len(b)):
for j in range(len(b[layer])):
bias = b[layer][unit]
if bias.symbol_set[0] in loss.symbol_set:
symbol_idx = loss.symbol_set.index(bias.symbol_set[0])
d_idx = [0]*loss.symbol_set_size
d_idx[symbol_idx] = 1
b[layer][unit] -= loss.get_derivative(d_idx) * lr
return w,b
After one GD step the loss function decrases
[11]:
weights, biases = GD_update(loss, weights, biases, 0.01)
N = N_f([x1,x2,x3], weights, biases)[0]
loss = loss_f(N, y)
print('loss = {0}'.format(loss.constant_cf))
loss = 5.648639112617553
Doing the same for several data points
[12]:
X = -1+2*np.random.rand(10,3)
[13]:
loss_history = []
weights = initialize_weights(n_units, order)
biases = initialize_biases(n_units, order)
epochs = 50
for e in range(epochs):
#Just records the error at the beginning of this step
epoch_loss = []
for xi in X:
N = N_f(xi, weights, biases)[0]
loss = loss_f(N, y_f(xi))
epoch_loss.append(loss.constant_cf)
loss_history.append(np.mean(epoch_loss))
#Updates the weights
for xi in X:
N = N_f(xi, weights, biases)[0]
loss = loss_f(N, y_f(xi))
weights, biases = GD_update(loss, weights, biases, 0.001)
print('epoch {0}, training loss: {1}'.format(e, loss_history[-1]))
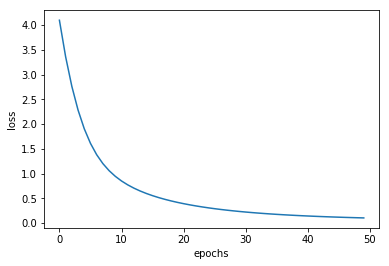
plt.plot(loss_history)
plt.xlabel('epochs')
plt.ylabel('loss')
epoch 49, training loss: 0.10428705104913479
[13]:
Text(0,0.5,'loss')